――日本の研究者が切り開く“農業ロボットの知能化”の新段階
農業分野では深刻な労働力不足と高齢化が進行しており、ロボットやAIによる自動化への期待が年々高まっています。しかし現実には、「収穫」という工程は想像以上に難しく、特に果実の状態や周囲環境によって判断が必要な作物では、完全自動化が大きな壁となってきました。
そうした中、日本の研究者が農業ロボットの常識を一段階引き上げる成果を発表しました。
大阪公立大学大学院工学研究科の 大阪公立大学 に所属する 藤永拓矢 助教が、
「ロボットがトマトを収穫できる確率そのものを予測するモデル」
を構築したのです。

🌱 なぜトマトの自動収穫はここまで難しいのか?
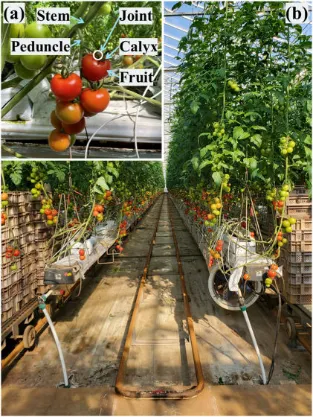
農業ロボットによる自動収穫は、葉物野菜や単純な形状の作物では実用化が進みつつあります。一方で、トマトのような房状果実は特に難易度が高いことで知られています。
理由は主に以下の点にあります。
- 熟した果実と未熟な果実が混在している
- 果実の向き・高さ・重なり方が一定でない
- 枝や葉、他の果実が「障害物」になる
- 無理な把持で果実や株を傷つけてしまうリスク
人間の農家であれば直感的に判断できるこれらの要素を、ロボットにどう理解させるかが長年の課題でした。
🤖 研究の核心:「どこから近づけば成功するか」を数値化
藤永氏の研究が画期的なのは、
従来の
👉「トマトを検出できるか」
👉「位置を認識できるか」
という段階から一歩進み、
👉 「このトマトは、どの方向からなら収穫に成功しやすいか?」
👉 「成功する確率はどれくらいか?」
という問いを定量的に扱った点にあります。
🔍 モデルの基本的な仕組み
研究では、ロボットが
- 左側
- 正面
- 右側
のどの方向から果実にアプローチすべきかを、画像認識+統計解析によって評価します。
単なる「可否」ではなく、成功確率を数値として予測する点が最大の特徴です。
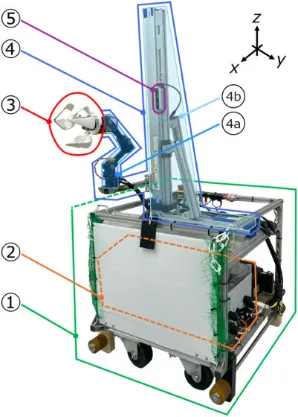
🏭 実験に使われたトマト収穫ロボットの構成
研究に用いられたロボットは、ビニールハウス内の植物工場で稼働する実用的な構成を持っています。
- レール上を自律移動可能
- 直線的に動く2本のアーム
- 柔軟に動く4本の関節付きアーム
- 3本指で果実をつかむ把持機構
- 果実と周囲環境を撮影するカメラ
この構成により、人間の腕と指に近い動作を再現しながら、データ収集が行われました。
📊 実証実験の結果:成功率81%、方向選択が鍵
ロボットを用いて100個のトマトを収穫した実験では、以下の結果が得られています。
- 収穫成功:81個
- 正面からの収穫:56個
- 右側からの収穫:16個
- 左側からの収穫:9個
この結果から、
「正面だけに固執せず、左右からもアプローチすることで成功率が高まる」
ことが明確に示されました。
📐 成功と失敗を分ける要因を“見える化”
藤永氏は、収穫の成否に影響する要素を定量的に分析しています。
例えば、
- トマトの前方に障害物がある → 失敗しやすい
- トマトの上部に柄(ヘタ)が見えている → 成功しやすい
といった傾向が、データとして裏付けられました。
これらの特徴量を用いて、
ロジスティック回帰という統計手法により、
収穫成功率を予測するモデルが構築されています。
🧠 「検出」から「収穫容易性推定」へのパラダイム転換
藤永氏は今回の研究について、次のように位置づけています。
「これは単に『ロボットはトマトを収穫できるか?』という問いを超え、
『収穫が成功する確率はどれくらいか?』を考える段階に進んだ研究です。
これは現実の農業にとって、より意味のある問いです」
この視点は非常に重要です。
なぜなら農業現場では、
- 失敗を減らす
- 時間を無駄にしない
- 果実や株を傷つけない
ことが収量とコストに直結するからです。
🌍 海外の農業ロボット研究との比較
海外でも、AIを用いた農業ロボット研究は進んでいます。
- アメリカ:機械学習でレタスやイチゴの収穫時期を判定
- ヨーロッパ:果実の熟度分類に特化したビジョンAI
- 中国:大量生産型ロボットによる単純作業の自動化
一方で今回の研究は、
「成功確率」という意思決定レベルに踏み込んだ点で、
国際的にも先進的な位置づけといえます。
🚜 日本農業へのインパクトは?
日本の農業は、
- 小規模・多品種
- 人手依存度が高い
- 高齢化が急速
という特徴を持っています。
今回のような
👉 選択的に収穫し、失敗を回避するロボット
は、日本の農業構造と非常に相性が良い技術です。
将来的には、
- 人手不足地域での実用化
- 24時間稼働による安定供給
- 熟練農家のノウハウの数値化
といった展開も期待されます。
📝 まとめ:農業ロボットは「考える段階」に入った
今回の研究は、
農業ロボットが単なる「作業機械」から、
状況を判断し、成功確率を考慮して行動する存在へと進化しつつあることを示しています。
「収穫できるかどうか」ではなく、
**「どれくらいの確率で成功するか」**を考える――。
この一歩が、
現実の農業を本当に支えるロボットへの分岐点になるのかもしれません。
